path tracer
Nadia Hyder, CS 184 Spring 2021
|
|
|


OVERVIEW
In this project, I explored and
implemented several path tracing algorithms to render images with realistic,
physical lighting. This project consists of 5 parts: ray generation and scene
intersection, bounding volume hierarchy, direct illumination, global
illumination, and adaptive sampling.
TASK 1: RAY GENERATION AND SCENE
INTERSECTION
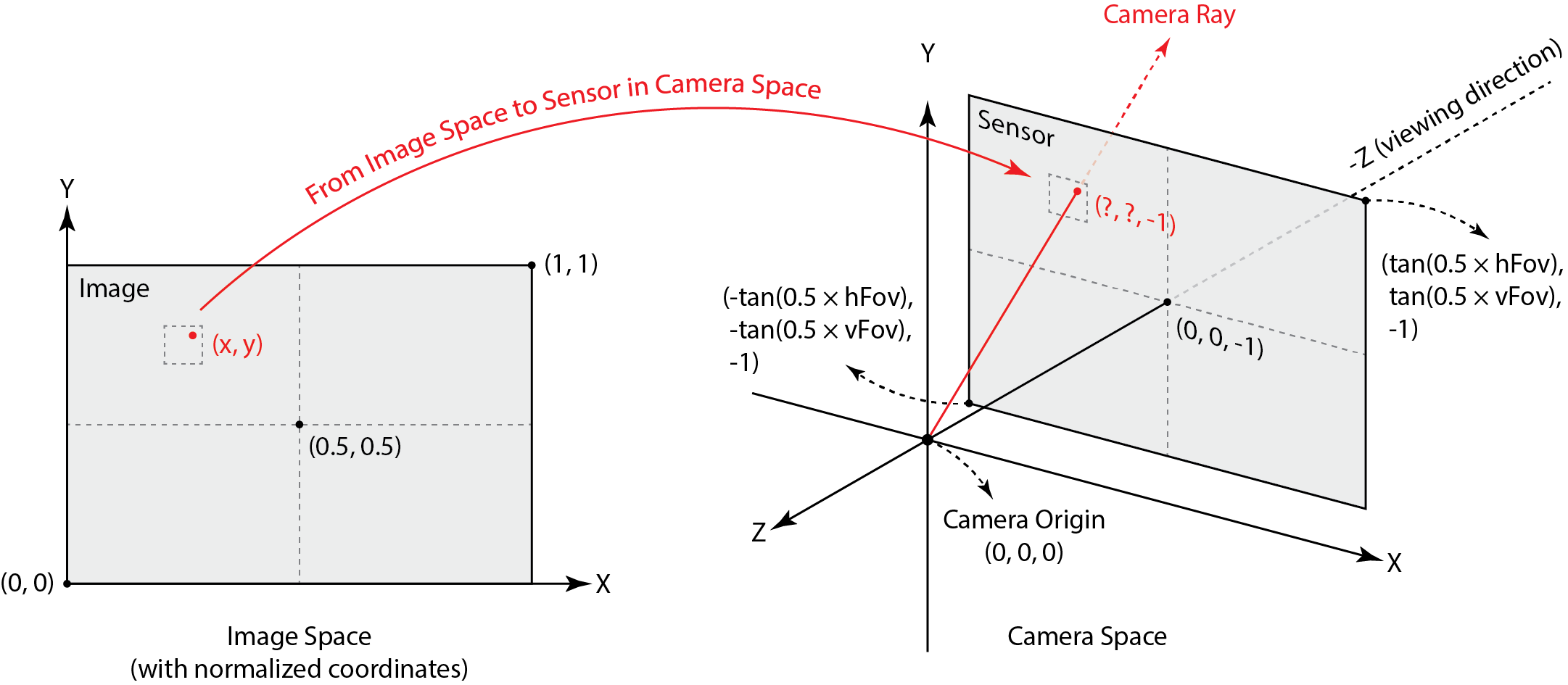
I first generated camera rays, taking
normalized image (x,y) coordinates and outputting
them as Ray objects in the world space. In order to do so, I first transformed
the image coordinates to camera space coordinates, generated rays in the camera
space, and finally transformed them into a Ray object in the world space,
characterized by an origin and direction.
The image below shows mappings from the
image space to the camera space.
To determine when and where a ray hits an
object, I wrote the Moller-Trumbore algorithm for
ray-triangle intersections:
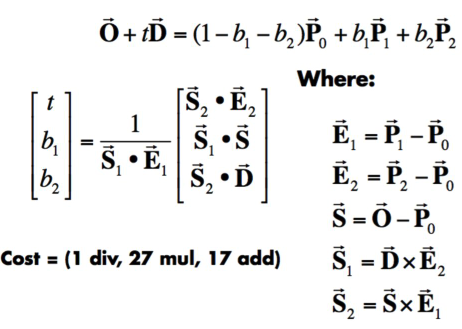
This algorithm both gives us the time, t
of intersection and allows us to express an intersection point in terms of
barycentric coordinates, used to perform a point-in-triangle test. If t is within the ray’s minimum and maximum possible time and
the intersection points are between 0 and 1, and valid intersection has
occurred. I then store t, the surface normal at the intersection, the primitive
type (triangle in this case) and the bsdf value in an
Intersection object.
With ray tracing and scene intersection,
I was able to generate images with normal shading:
|
|
|


TASK 2: BOUNDING VOLUME HIERARCHY
Next, I implemented a bounding volume
hierarchy binary tree. Nodes in the tree represent a subset of primitives in
the scene. An internal node stores a bounding box of all objects inside it and
reference to child nodes, while a leaf node stores its bounding box and a list
of objects. The BVH allows us to quickly traverse the scene and quickly discard
primitives that a given ray will not intersect. Next, I implemented a method to
split the tree. For each bounding box axis, I computed the mean of the
centroid, and traversed all primitives in the axis, placing bboxes
with centroids greater than the mean in a right tree, and others in a left
subtree. I split across the axis with the smallest heuristic cost, calculated
by summing the product of the extent of the box over every axis. I recursed and
split the tree further into right and left bounding boxes based on centroid
values.
Using BVH acceleration I was able to
efficiently render images with several thousand primitives in a matter of
seconds:
|
cow.dae |
maxplanck.dae |
CBlucy.dae |
|
|
|
|
|
Built BVH
from 5856 primitives: 0.0128 sec Rendering:
0.0560s BVH traced
451690 rays. Average
speed 8.0685 million rays per second. Averaged
4.179096 intersection tests per ray. |
Built BVH
from 50801 primitives: 0.1421 sec Rendering:
100%! (0.1835s) BVH traced
465390 rays. Average
speed 2.5357 million rays per second. Averaged
13.131928 intersection tests per ray. |
Built BVH
from 133796 primitives: 0.4669 sec Rendering:
(0.0843s) BVH traced
459070 rays. Average
speed 5.4469 million rays per second. Averaged
7.214240 intersection tests per ray. |



Using
a BVH gave massive speed-ups and performance improvements. I was able to render
scenes with many primitives at much faster speeds; without BVH rendering the
cow took 2 minutes and 31 seconds, and I could not even render maxplanck or CBlucy on my
machine. BVH improved the speed greatly by discarding nodes with bounding boxes
and primitives that do not intersect with the camera rays. I was able to reduce
the run time from O(n) to O(log n), where n is the number of primitives in the
scene.
As
a side note, the intersection tests make a huge difference in performance. On
my first attempt, my triangle intersection test was buggy and rendering cow.dae took 31 seconds.
TASK 3: DIRECT ILLUMINATION
For the next part of the project, I simulated
light transport in the scene to render images with realistic shading. I
implemented two direct lighting estimation methods: uniform hemisphere sampling
and importance sampling. I then used Monte Carlo integration to estimate
irradiance.
To perform uniform hemisphere sampling, I
estimated the direct lighting on a point by sampling in a hemisphere uniformly.
I first converted the hemisphere to world coordinates and calculated a ray with
the sample as the direction and (sample + point of interest) as the origin. If
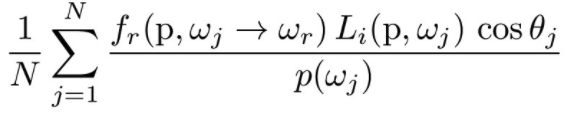
the ray intersected the BVH, I computed the amount of light arriving at the
intersection point using a Monte Carlo estimator. The Monte Carlo estimator
integrates over all light arriving in a hemisphere around a point of interest:
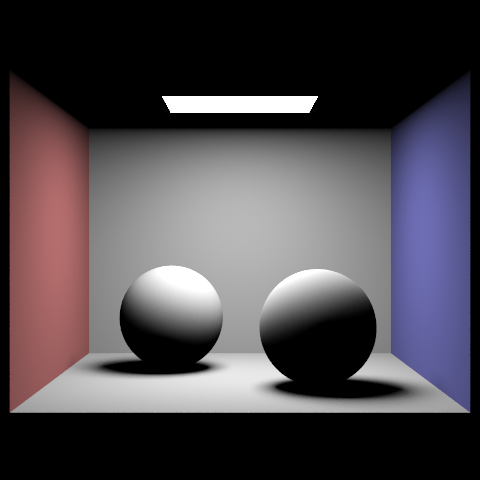
The following is the result of running
uniform hemisphere sampling for CBspheres_lambertian.dae:
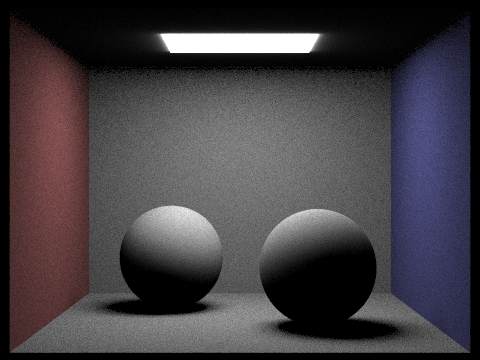
To perform importance sampling, I sampled
all light directly rather than over uniform distributions in a hemisphere. This
performed better than uniform hemisphere sampling, which was quite noisy. I
summed over every light source in a scene and sampled directions between the
light source and the point of interest, hit_p. Like
in the previous part, I checked if the cosine of the ray was positive (the
light is in front of the object and visible) and if it intersected the BVH. I
then Monte Carlo integration. If the light was a delta light, I only sampled
once, as all samples would be the same.
This is the output from importance
sampling for CBspheres_lambertian.dae:
When there are fewer light rays, the
rendered images are noisier. The images below show outputs from rendering with
increasing numbers of light rays and 1 sample per pixel using importance
sampling: As the number of light rays increases, shadows are more visible and
the images are less noisy due to having enough light rays to match the amount
of information. Increasing the number of light rays and samples gives more
realistic images.
|
1 ray |
4 rays |
|
|
|
|
16 rays |
64 rays |
|
|
|




To conclude this section, the two images below
show how an image is rendered using uniform hemisphere sampling and how the
same image is rendered using importance sampling. We can see how the two
approaches generate very different results; uniform sampling gives us a much
grainier, noisier image, This is because we only sample the hemisphere and miss
several rays, yielding a darker image with several dark spots. Importance
sampling, however, effectively considers rays that influence the result by
sampling lights. Importance sampling uses more information (and thus better
represents information) but is more time and resource intensive.
|
Uniform hemisphere sampling |
Importance sampling |
|
|
|


TASK 4: GLOBAL ILLUMINATION
In task 3, we only looked at direct lighting.
In this part, I took it a step further and considered full global illumination
to render the effects of indirect lighting.
To implement this, I found the radiance
when there are 0 bounces of light () and 1 bounce of light. I could then find
the radiance when there is at least one bounce of light (in the function at_least_one_bounce_radiance) by using the summing zero_bounce_radiance with at_least_one_bounce_radiance,
which sums its radiance with one_bounce_radiance over
several recursive calls. at_least_one_bounce_radiance
traces a ray in the direction of a given sample based on the BSDF at the hit
point, and recursively calls itself on the new hit point. While the goal in
this part is to integrate over as many paths of all lengths, we cannot realistically
perform this, so I used Russian Roulette for an unbiased method of random
termination. Termination probability can be arbitrary; I used a termination
probability of 0.3. I recursed until reaching the maximum number of ray bounces
(max_ray_depth) or until the new ray no longer
intersected the BVH (the ray does not bounce off anything).
Here is a comparison of the same image
rendered with different lighting:
|
Direct lighting |
Indirect lighting |
Direct & indirect lighting |
|
|
|
|



The following gif of bunny.dae
shows how the image changes with increasing ray depth. The images are rendered
with max_ray_depth of 0, 1, 2, 3, and 100 with 1024
samples per pixel:
|
|
|
|



|
|
|


This gif shows the effect of increasing
sample-per-pixel rates for spheres.dae. Sample rates
are 1, 2, 4, 8, 16, 64, and 1024 with 4 light rays:
.
|
|
|
|
|
|
|
|
|
|
||







TASK 5: ADAPTIVE SAMPLING
For
the final part of this project, I implemented an algorithm for adaptive
sampling. Monte Carlo path tracing produces noice due
to the large number of samples per pixel. Adaptive sampling is used to reduce
the number of samples per pixel by determining which pixels need more samples
to get rid of noise and which converge faster. This algorithm calculates a 95%
confidence interval of μ – I and
μ
+ I. I solved for pixel convergence I:
![]()
I
is small when the samples variance is small, so when I <= maxTolerance * μ, we assume the pixel has converged and do not
trace anymore rays for the pixel.
I
calculated the mean and variance as follows:
|
|
|


After
implementing adaptive sampling, this is what bunny.dae
and its sampling rate image look like, with 2048 samples per pixel and max ray
depth of 5:
|
|
|

